
|
Hi there 👋 #OPEN TO WORK💼 With excellent research, problem-solving, and collaboration abilities, I'm expecting roles as Software Developer / Test Engineer / Simulation Engineer / AI Engineer in the fields of AD/ADAS or general Engineering fields. |

|
|
|
|
|
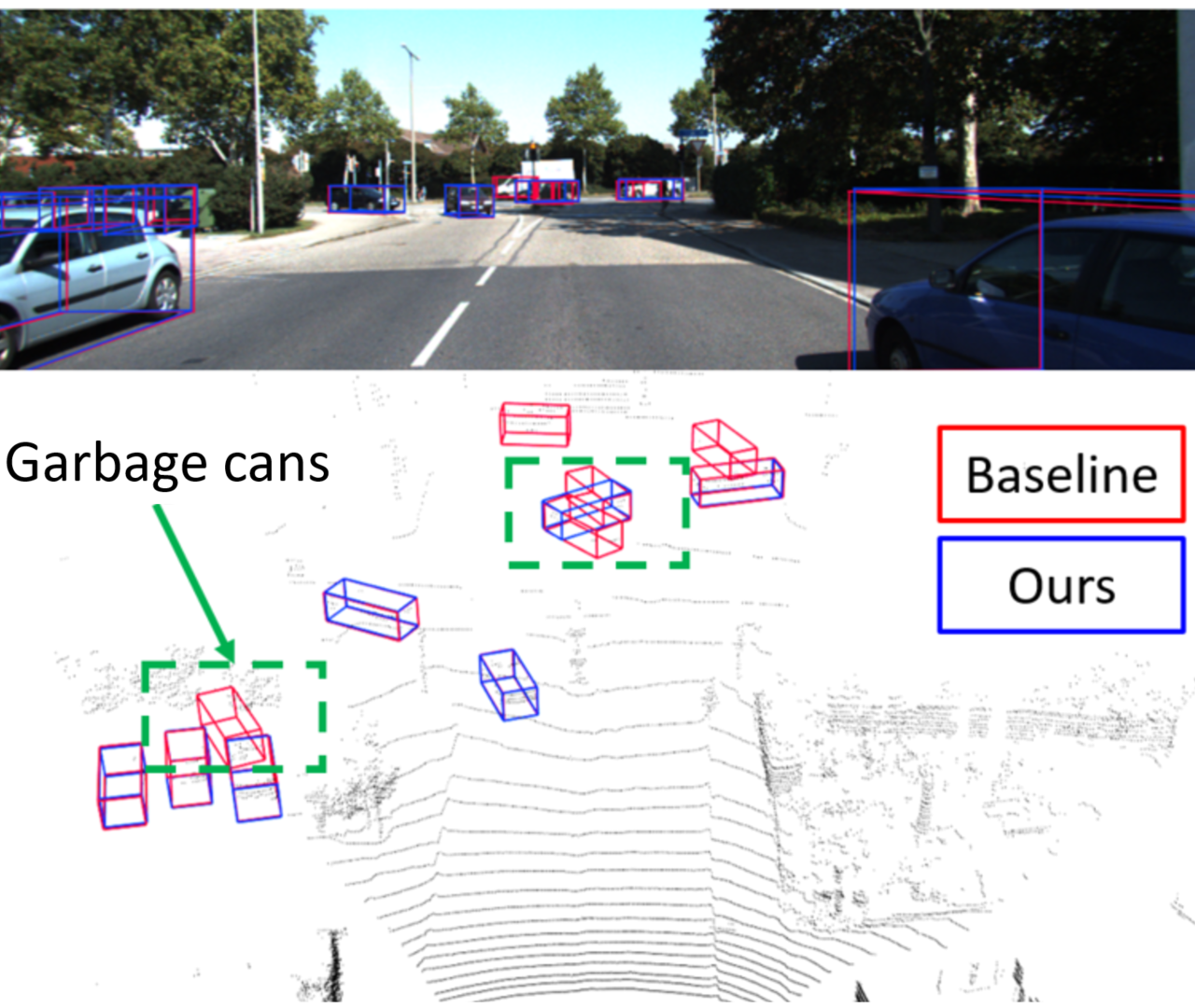
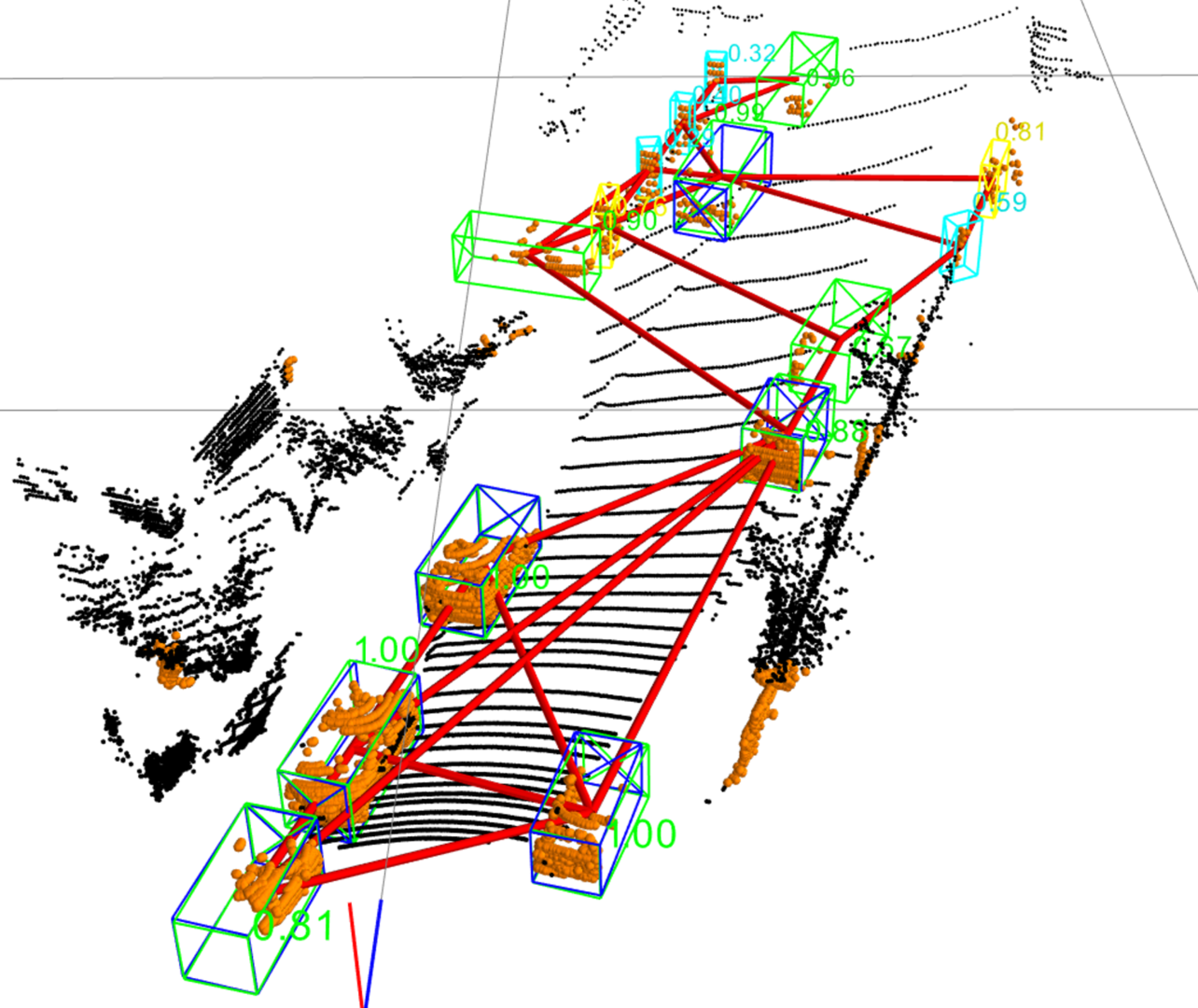
GraphRelate3D: Context-Dependent 3D Object Detection with Inter-Object Relationship Graphs
We introduce a GNN-based object relation module to learn the spatial context explicitly
to improve 3D object detection. |
|
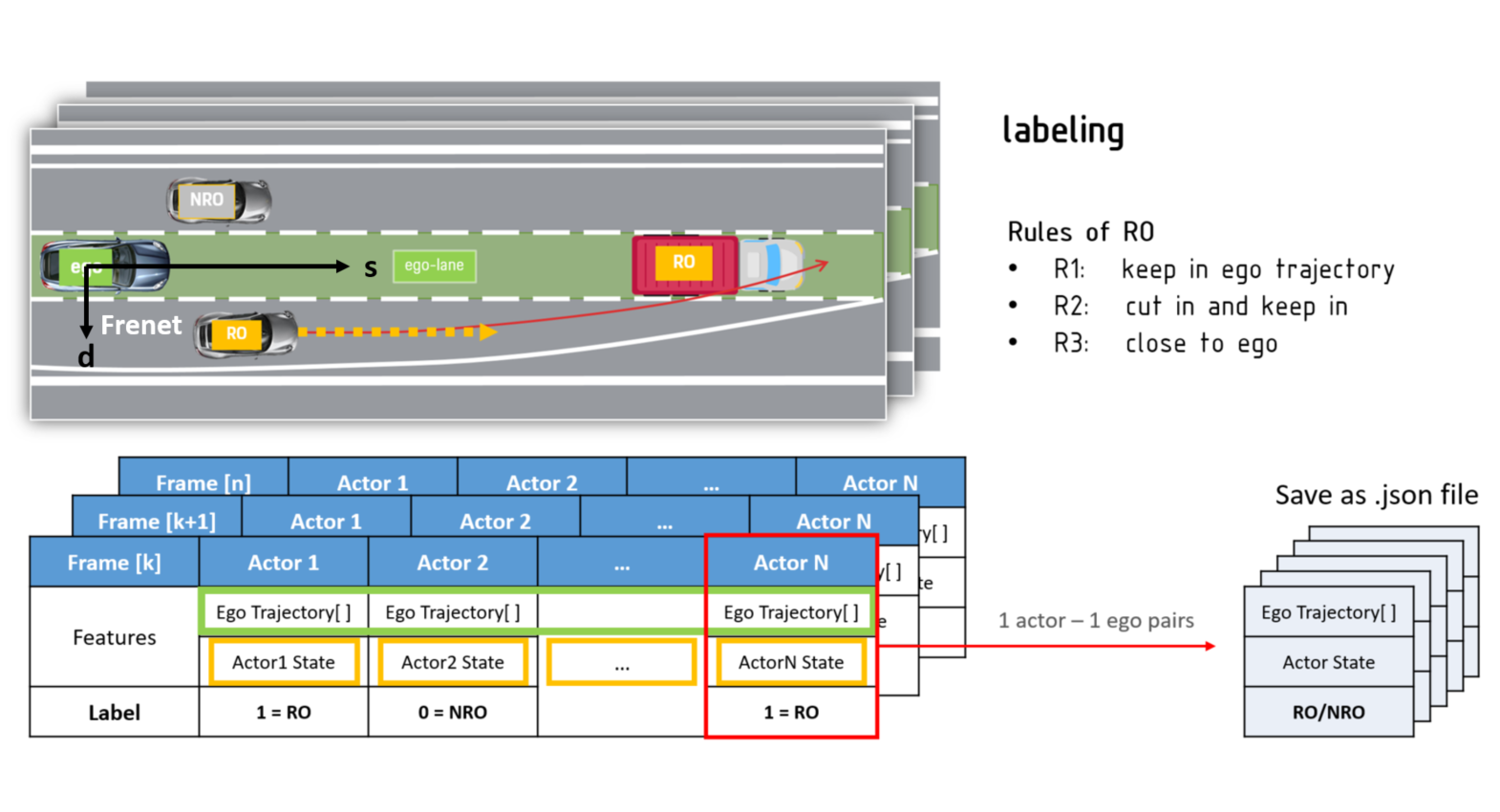
Autonomous Driving Simulator on NRP We aimed to develope an autonomous driving simulator and benchmark as an extended module of Neuro-Robotics Platform (NRP) using Unity game engine and ROS2.
My contributions were: |
|
Build dataset, label actor vehicles as "safe" or "unsafe" upon their Frenet locations and velocities relative to ego car in every single frame. Train a classifier to infer actor vehicle's collision potential upon its history behavior.
• Label actor vehicles as "safe"/"unsafe" with Frenet-coord; |
|
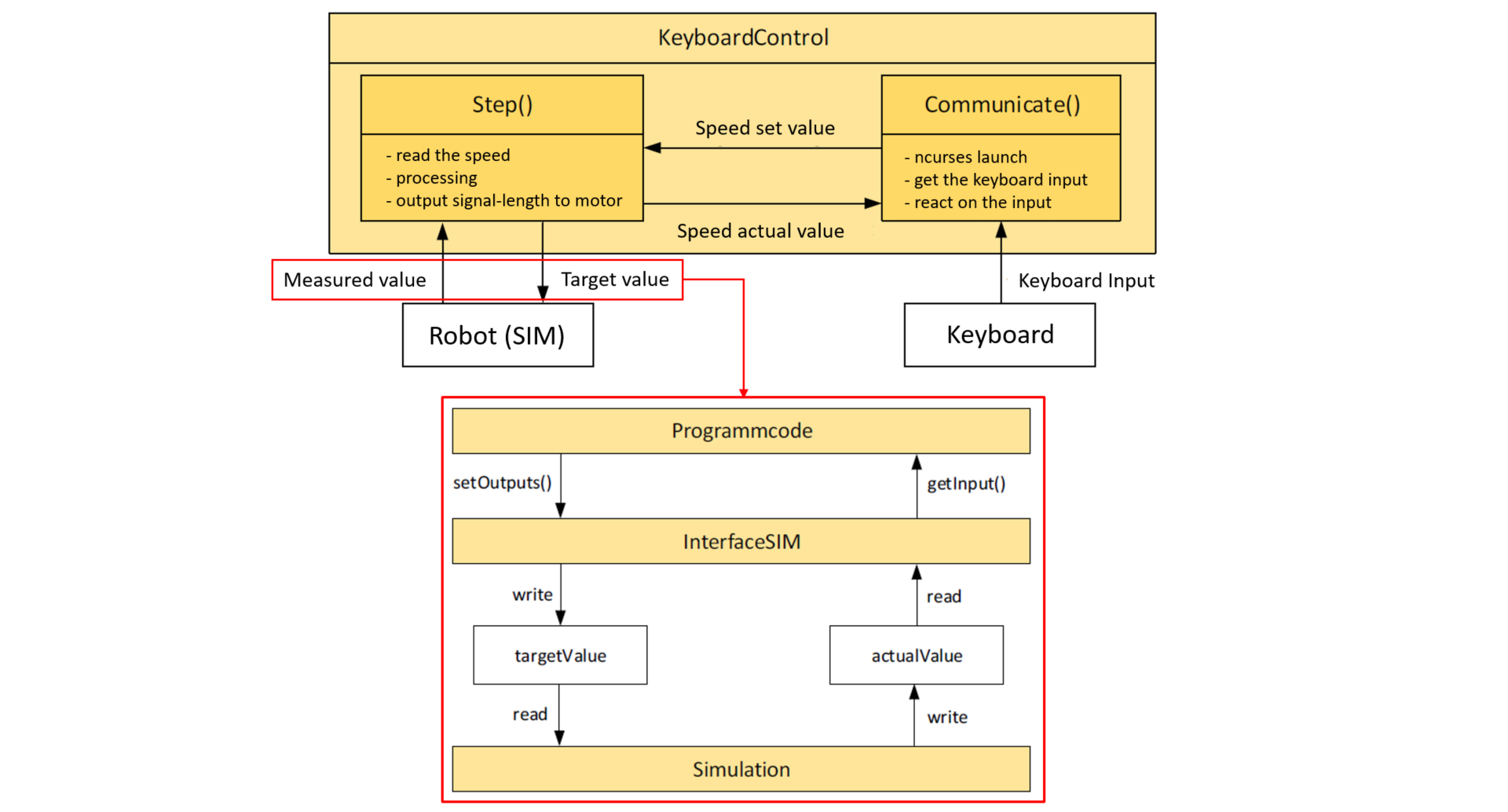
A practical course of our TUM AIS. Practiced OOP and organized programming style of C++. The simulation in Unity Engine was provided by tutor. The controller consists of functions of: |
|
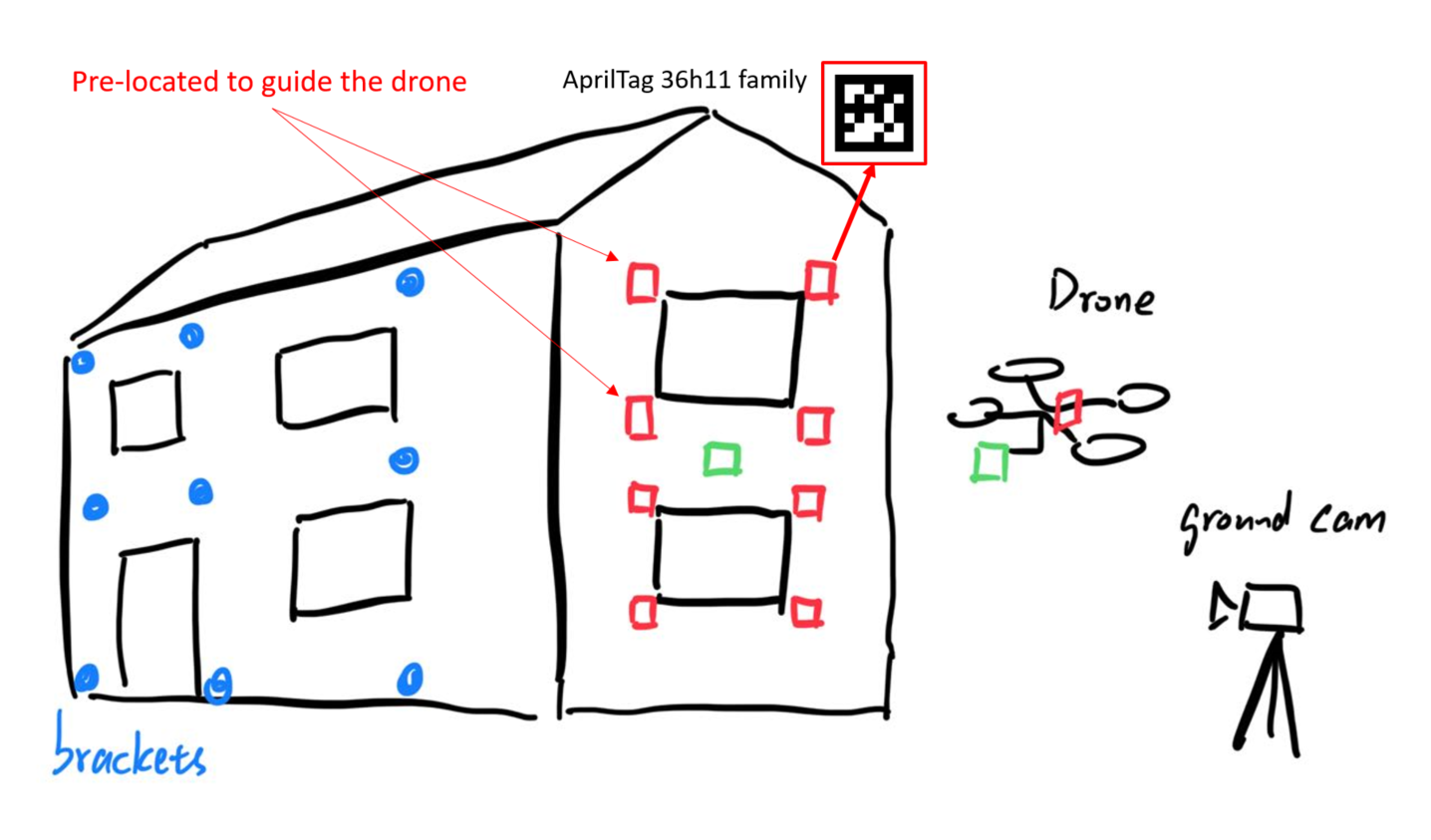
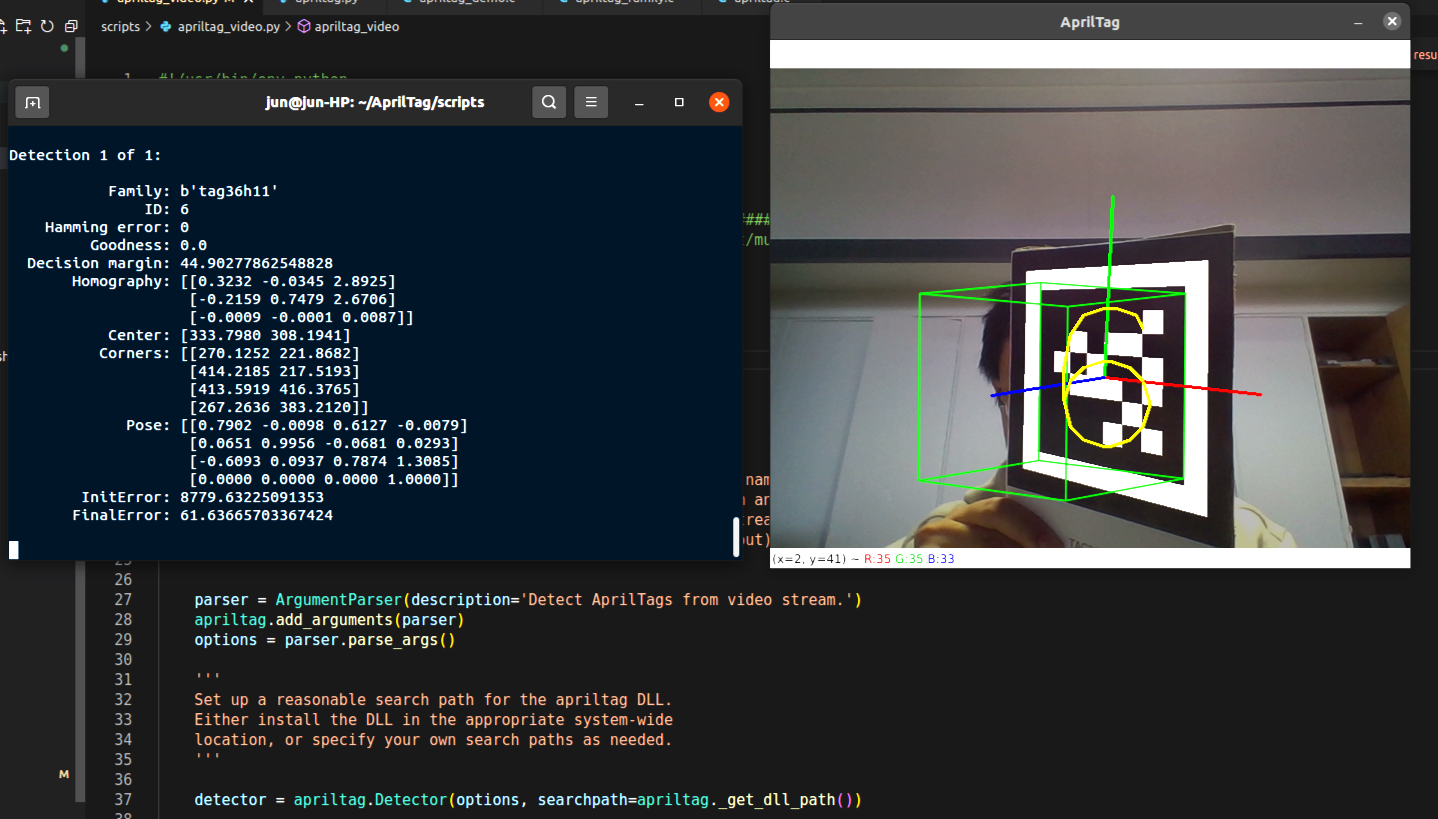
We aimed to develop an automated building construction solution with the help of UAV. We use the
AprilTag
to guide the UAV to the expected positions and mount the brackets on the exterior wall of
buildings.
My contributions were: |
|
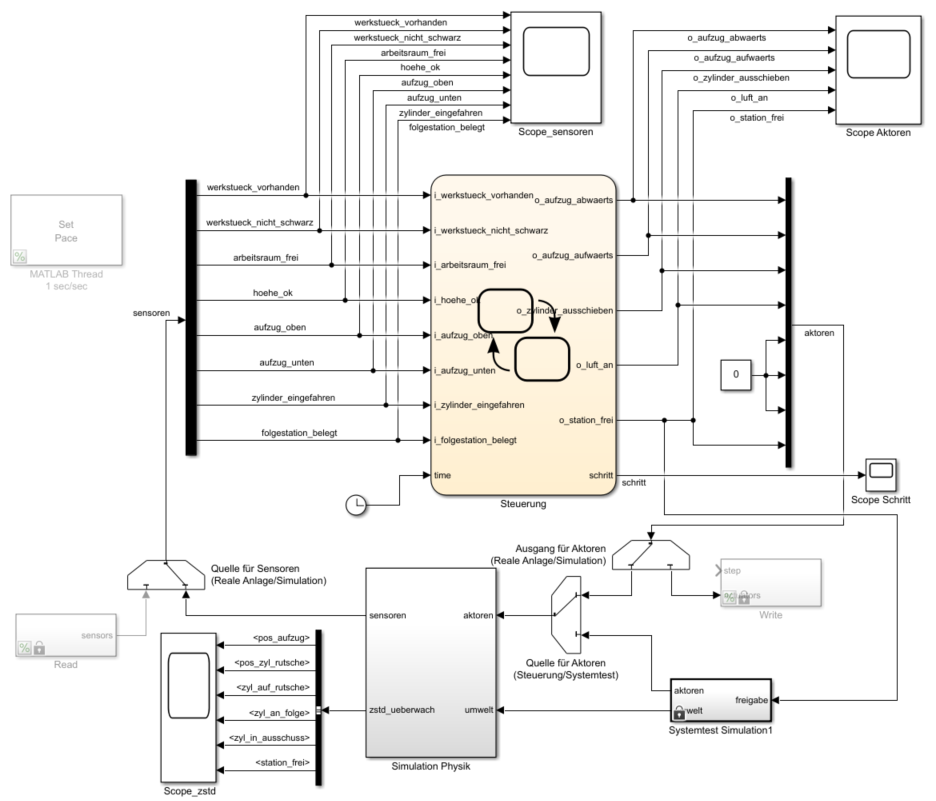
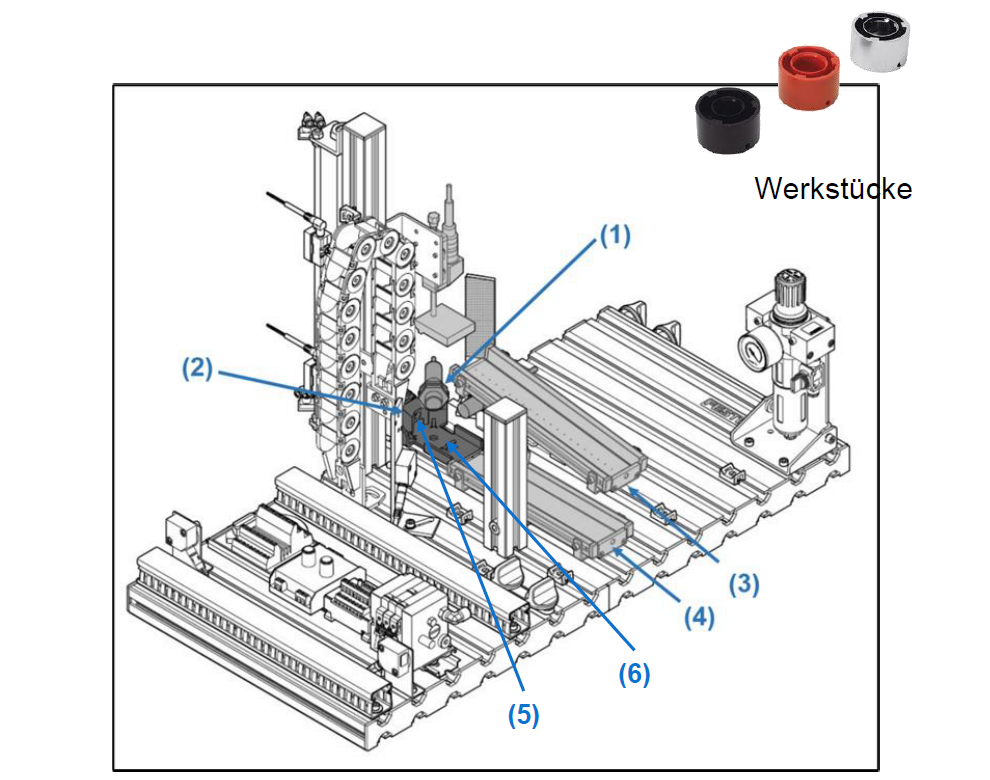
Cylinders with lids are directed to the next station, while cylinders without lids go to the reject chute. To avoid a collision with the next station, a sensor is included that receives a release signal from it. A transmitter, which sends a release signal to the previous station, prevents its crane from colliding with the lift platform. The sorting system is designed in Simulink, including a StateFlow chart for process control. |

|
Links to my github repos: |
|
|
|
|
10.2020 - 06.2024 |
|
|
09.2015 - 06.2019 |
|
|
|
11.2024 - present |
|
|
03.2023 - 08.2023 Mönsheim, Germany |
|
|
10.2022 - 02.2023 Munich, Germany |
|
|
10.2022 - 02.2023 Munich, Germany |
|
|
06.2016 - 06.2019 Guangzhou, China |
|
|













































|
|
Updated Feb. 2025
|